Les antipyrétiques pour enfants sont prescrits par un pédiatre. Mais il existe des situations d'urgence avec de la fièvre où l'enfant doit recevoir immédiatement des médicaments. Ensuite, les parents prennent leurs responsabilités et utilisent des médicaments antipyrétiques. Qu'est-ce qu'il est permis de donner aux nourrissons ? Comment faire baisser la température chez les enfants plus âgés ? Quels médicaments sont les plus sûrs ?
Puisque la vitesse linéaire change uniformément de direction, le mouvement circulaire ne peut pas être qualifié d’uniforme, il est uniformément accéléré.
Vitesse angulaire
Choisissons un point sur le cercle 1 . Construisons un rayon. Dans une unité de temps, le point se déplacera vers le point 2 . Dans ce cas, le rayon décrit l'angle. La vitesse angulaire est numériquement égale à l'angle de rotation du rayon par unité de temps.


Période et fréquence
Période de rotation T- c'est le temps pendant lequel le corps fait un tour.
La fréquence de rotation est le nombre de tours par seconde.


La fréquence et la période sont interdépendantes par la relation


Relation avec la vitesse angulaire


Vitesse linéaire
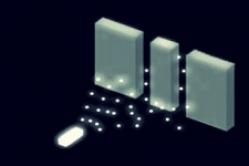
Chaque point du cercle se déplace à une certaine vitesse. Cette vitesse est dite linéaire. La direction du vecteur vitesse linéaire coïncide toujours avec la tangente au cercle. Par exemple, des étincelles provenant du dessous d’une rectifieuse se déplacent, répétant la direction de la vitesse instantanée.

Considérons un point sur un cercle qui fait un tour, le temps passé est la période T Le chemin parcouru par un point est la circonférence.


Accélération centripète
Lors d'un déplacement en cercle, le vecteur accélération est toujours perpendiculaire au vecteur vitesse, dirigé vers le centre du cercle.



En utilisant les formules précédentes, nous pouvons déduire les relations suivantes

Les points situés sur la même ligne droite partant du centre du cercle (par exemple, il peut s'agir de points situés sur les rayons d'une roue) auront les mêmes vitesses angulaires, période et fréquence. Autrement dit, ils tourneront de la même manière, mais avec des vitesses linéaires différentes. Plus un point est éloigné du centre, plus il se déplacera rapidement.
La loi de l'addition des vitesses est également valable pour le mouvement de rotation. Si le mouvement d'un corps ou d'un cadre de référence n'est pas uniforme, alors la loi s'applique aux vitesses instantanées. Par exemple, la vitesse d'une personne marchant le long du bord d'un carrousel en rotation est égale à la somme vectorielle de la vitesse linéaire de rotation du bord du carrousel et de la vitesse de la personne.
La Terre participe à deux mouvements de rotation principaux : diurne (autour de son axe) et orbital (autour du Soleil). La période de rotation de la Terre autour du Soleil est de 1 an ou 365 jours. La Terre tourne autour de son axe d'ouest en est, la période de cette rotation est de 1 jour ou 24 heures. La latitude est l'angle entre le plan de l'équateur et la direction allant du centre de la Terre vers un point de sa surface.
Selon la deuxième loi de Newton, la cause de toute accélération est la force. Si un corps en mouvement subit une accélération centripète, la nature des forces qui provoquent cette accélération peut être différente. Par exemple, si un corps se déplace en cercle sur une corde qui lui est attachée, alors la force agissant est la force élastique.

Si un corps posé sur un disque tourne avec le disque autour de son axe, alors une telle force est la force de frottement. Si la force arrête son action, alors le corps continuera à se déplacer en ligne droite.
Considérons le mouvement d'un point sur un cercle de A à B. La vitesse linéaire est égale à
Passons maintenant à un système stationnaire connecté au sol. L'accélération totale du point A restera la même en amplitude et en direction, puisque lors du passage d'un système de référence inertiel à un autre, l'accélération ne change pas. Du point de vue d'un observateur stationnaire, la trajectoire du point A n'est plus un cercle, mais une courbe plus complexe (cycloïde), le long de laquelle le point se déplace de manière inégale.
Mouvement d'un corps en cercle avec une vitesse absolue constante- il s'agit d'un mouvement dans lequel un corps décrit des arcs identiques à des intervalles de temps égaux.
La position du corps sur le cercle est déterminée vecteur de rayon\(~\vec r\) tiré du centre du cercle. Le module du rayon vecteur est égal au rayon du cercle R.(Fig. 1).
Pendant le temps Δ t corps se déplaçant à partir d'un point UN exactement DANS, rend un déplacement \(~\Delta \vec r\) égal à la corde UN B, et parcourt un chemin égal à la longueur de l'arc je.
Le rayon vecteur tourne d'un angle Δ φ . L'angle est exprimé en radians.
La vitesse \(~\vec \upsilon\) du mouvement d'un corps le long d'une trajectoire (cercle) est dirigée tangente à la trajectoire. On l'appelle vitesse linéaire. Le module de vitesse linéaire est égal au rapport de la longueur de l'arc de cercle jeà l'intervalle de temps Δ t pour lequel cet arc est complété :
\(~\upsilon = \frac(l)(\Delta t).\)
Une grandeur physique scalaire, numériquement égale au rapport de l'angle de rotation du rayon vecteur à la période de temps pendant laquelle cette rotation s'est produite, est appelée vitesse angulaire:
\(~\omega = \frac(\Delta \varphi)(\Delta t).\)
L'unité SI de vitesse angulaire est le radian par seconde (rad/s).
Avec un mouvement uniforme dans un cercle, la vitesse angulaire et le module de vitesse linéaire sont des quantités constantes : ω = const; υ = const.
La position du corps peut être déterminée si le module du rayon vecteur \(~\vec r\) et l'angle φ , qu'il compose avec l'axe Bœuf(coordonnée angulaire). Si au moment initial t 0 = 0 coordonnée angulaire est φ 0 , et à l'heure t c'est égal φ , alors l'angle de rotation Δ φ le rayon vecteur pour le temps \(~\Delta t = t - t_0 = t\) est égal à \(~\Delta \varphi = \varphi - \varphi_0\). Alors à partir de la dernière formule on peut obtenir équation cinématique du mouvement d'un point matériel le long d'un cercle:
\(~\varphi = \varphi_0 + \omega t.\)
Il permet de déterminer la position du corps à tout moment t. En considérant que \(~\Delta \varphi = \frac(l)(R)\), on obtient \[~\omega = \frac(l)(R \Delta t) = \frac(\upsilon)(R) \Flèche droite\]
\(~\upsilon = \omega R\) - formule pour la relation entre la vitesse linéaire et angulaire.
Intervalle de temps Τ pendant laquelle le corps fait un tour complet s'appelle période de rotation:
\(~T = \frac(\Delta t)(N),\)
Où N- nombre de tours effectués par le corps pendant le temps Δ t.
Pendant le temps Δ t = Τ le corps parcourt le chemin \(~l = 2 \pi R\). Ainsi,
\(~\upsilon = \frac(2 \pi R)(T); \ \omega = \frac(2 \pi)(T) .\)
Ordre de grandeur ν , l'inverse de la période, indiquant le nombre de tours qu'un corps fait par unité de temps, est appelé vitesse de rotation:
\(~\nu = \frac(1)(T) = \frac(N)(\Delta t).\)
Ainsi,
\(~\upsilon = 2 \pi \nu R; \\omega = 2 \pi \nu .\)
Littérature
Aksenovich L. A. Physique au lycée : Théorie. Tâches. Tests : Manuel. allocation pour les établissements dispensant un enseignement général. environnement, éducation / L. A. Aksenovich, N. N. Rakina, K. S. Farino ; Éd. KS Farino. - Mn. : Adukatsiya i viakhavanne, 2004. - P. 18-19.
Dans cette leçon, nous examinerons le mouvement curviligne, c'est-à-dire le mouvement uniforme d'un corps en cercle. Nous apprendrons ce qu'est la vitesse linéaire, l'accélération centripète lorsqu'un corps se déplace en cercle. Nous présenterons également les grandeurs qui caractérisent le mouvement de rotation (période de rotation, fréquence de rotation, vitesse angulaire) et relierons ces grandeurs entre elles.
Par mouvement circulaire uniforme, nous entendons que le corps tourne du même angle sur une période de temps égale (voir Fig. 6).

Riz. 6. Mouvement uniforme en cercle
C'est-à-dire que le module de vitesse instantanée ne change pas :
Cette vitesse est appelée linéaire.
Bien que l’amplitude de la vitesse ne change pas, la direction de la vitesse change continuellement. Considérons les vecteurs vitesse aux points UN Et B(voir fig. 7). Ils sont dirigés dans des directions différentes, ils ne sont donc pas égaux. Si on soustrait à la vitesse au point B vitesse au point UN, on obtient le vecteur .

Riz. 7. Vecteurs de vitesse
Le rapport entre le changement de vitesse () et le temps pendant lequel ce changement s'est produit () est l'accélération.
Tout mouvement curviligne est donc accéléré.
Si l'on considère le triangle des vitesses obtenu sur la figure 7, alors avec une disposition très serrée des points UN Et B entre eux, l'angle (α) entre les vecteurs vitesse sera proche de zéro :
On sait aussi que ce triangle est isocèle, donc les modules de vitesse sont égaux (mouvement uniforme) :
Par conséquent, les deux angles à la base de ce triangle sont indéfiniment proches de :
![]()
Cela signifie que l’accélération, dirigée le long du vecteur, est en réalité perpendiculaire à la tangente. On sait qu'une droite dans un cercle perpendiculaire à une tangente est un rayon, donc l'accélération est dirigée le long du rayon vers le centre du cercle. Cette accélération est dite centripète.
La figure 8 montre le triangle de vitesse discuté précédemment et un triangle isocèle (les deux côtés sont les rayons du cercle). Ces triangles sont semblables car ils ont des angles égaux formés par des lignes perpendiculaires entre elles (le rayon et le vecteur sont perpendiculaires à la tangente).

Riz. 8. Illustration pour la dérivation de la formule de l'accélération centripète
Segment de ligne UN B est move(). Nous considérons un mouvement uniforme dans un cercle, donc :
![]()
Remplaçons l'expression résultante par UN B dans la formule de similarité triangulaire :
Les notions de « vitesse linéaire », « accélération », « coordonnée » ne suffisent pas pour décrire un mouvement le long d'une trajectoire courbe. Il est donc nécessaire d’introduire des grandeurs caractérisant le mouvement de rotation.
1. Période de rotation (T ) est appelé le temps d’une révolution complète. Mesuré en unités SI en secondes.
Exemples de périodes : La Terre tourne autour de son axe en 24 heures (), et autour du Soleil - en 1 an ().
Formule de calcul de la période :
où est la durée totale de rotation ; - nombre de tours.
2. Fréquence de rotation (n ) - le nombre de tours qu'un corps fait par unité de temps. Mesuré en unités SI en secondes réciproques.
Formule pour trouver la fréquence :
où est la durée totale de rotation ; - nombre de tours
La fréquence et la période sont des quantités inversement proportionnelles :
3. Vitesse angulaire () appelons le rapport entre la variation de l'angle selon lequel le corps a tourné et le temps pendant lequel cette rotation s'est produite. Mesuré en unités SI en radians divisés par secondes.
Formule pour trouver la vitesse angulaire :
où est le changement d'angle ; - temps pendant lequel le virage d'un angle s'est produit.
1. Mouvement uniforme en cercle
2. Vitesse angulaire du mouvement de rotation.
3. Période de rotation.
4. Vitesse de rotation.
5. Relation entre vitesse linéaire et vitesse angulaire.
6. Accélération centripète.
7. Mouvement également alterné en cercle.
8. Accélération angulaire dans un mouvement circulaire uniforme.
9. Accélération tangentielle.
10. Loi du mouvement uniformément accéléré dans un cercle.
11. Vitesse angulaire moyenne en mouvement uniformément accéléré dans un cercle.
12. Formules établissant la relation entre la vitesse angulaire, l'accélération angulaire et l'angle de rotation dans un mouvement uniformément accéléré dans un cercle.
1.Mouvement uniforme autour d'un cercle– mouvement dans lequel un point matériel traverse des segments égaux d’un arc de cercle à intervalles de temps égaux, c’est-à-dire le point se déplace en cercle avec une vitesse absolue constante. Dans ce cas, la vitesse est égale au rapport de l'arc de cercle parcouru par le point au temps de déplacement, c'est-à-dire
et s'appelle la vitesse linéaire de déplacement dans un cercle.
Comme dans le mouvement curviligne, le vecteur vitesse est dirigé tangentiellement au cercle dans la direction du mouvement (Fig. 25).
2. Vitesse angulaire dans un mouvement circulaire uniforme– rapport entre l'angle de rotation du rayon et le temps de rotation :
Dans un mouvement circulaire uniforme, la vitesse angulaire est constante. Dans le système SI, la vitesse angulaire est mesurée en (rad/s). Un radian - un rad est l'angle au centre qui sous-tend un arc de cercle d'une longueur égale au rayon. Un angle complet contient des radians, c'est-à-dire par tour, le rayon tourne d'un angle de radians.
3. Période de rotation– intervalle de temps T pendant lequel un point matériel fait un tour complet. Dans le système SI, la période est mesurée en secondes.
4. Fréquence de rotation– le nombre de tours effectués en une seconde. Dans le système SI, la fréquence est mesurée en hertz (1 Hz = 1). Un hertz est la fréquence à laquelle un tour est effectué en une seconde. C'est facile d'imaginer que
Si pendant le temps t un point fait n tours autour d'un cercle alors .
Connaissant la période et la fréquence de rotation, la vitesse angulaire peut être calculée à l'aide de la formule :
5 Relation entre la vitesse linéaire et la vitesse angulaire. La longueur d'un arc de cercle est égale à l'angle au centre, exprimé en radians, le rayon du cercle sous-tendant l'arc. Maintenant, nous écrivons la vitesse linéaire sous la forme
Il est souvent pratique d'utiliser les formules : ou La vitesse angulaire est souvent appelée fréquence cyclique et la fréquence est appelée fréquence linéaire.
6. Accélération centripète. Dans un mouvement uniforme autour d'un cercle, le module de vitesse reste inchangé, mais sa direction change continuellement (Fig. 26). Cela signifie qu’un corps se déplaçant uniformément dans un cercle subit une accélération dirigée vers le centre et appelée accélération centripète.
Laissez parcourir une distance égale à un arc de cercle dans un laps de temps. Déplaçons le vecteur en le laissant parallèle à lui-même, de sorte que son début coïncide avec le début du vecteur au point B. Le module de changement de vitesse est égal à , et le module d'accélération centripète est égal
Sur la figure 26, les triangles AOB et DVS sont isocèles et les angles aux sommets O et B sont égaux, tout comme les angles dont les côtés AO et OB sont mutuellement perpendiculaires. Cela signifie que les triangles AOB et DVS sont similaires. Par conséquent, si, c'est-à-dire que l'intervalle de temps prend des valeurs arbitrairement petites, alors l'arc peut être approximativement considéré comme égal à la corde AB, c'est-à-dire . Par conséquent, nous pouvons écrire En considérant que VD = , OA = R nous obtenons En multipliant les deux côtés de la dernière égalité par , nous obtenons en outre l'expression du module d'accélération centripète en mouvement uniforme dans un cercle : . Considérant que nous obtenons deux formules fréquemment utilisées :
Ainsi, en mouvement uniforme autour d’un cercle, l’accélération centripète est d’ampleur constante.
Il est facile de comprendre que dans la limite à , angle . Cela signifie que les angles à la base du DS du triangle ICE tendent vers la valeur , et le vecteur de changement de vitesse devient perpendiculaire au vecteur vitesse, c'est-à-dire dirigé radialement vers le centre du cercle.
7. Mouvement circulaire également alterné– mouvement circulaire dans lequel la vitesse angulaire change de la même manière sur des intervalles de temps égaux.
8. Accélération angulaire dans un mouvement circulaire uniforme– le rapport entre le changement de vitesse angulaire et l'intervalle de temps pendant lequel ce changement s'est produit, c'est-à-dire
où la valeur initiale de la vitesse angulaire, la valeur finale de la vitesse angulaire, l'accélération angulaire, dans le système SI est mesurée en . De la dernière égalité on obtient des formules de calcul de la vitesse angulaire
Et si .
En multipliant les deux côtés de ces égalités par et en tenant compte de cela, on obtient l'accélération tangentielle, c'est-à-dire accélération dirigée tangentiellement au cercle, on obtient des formules de calcul de la vitesse linéaire :
Et si .
9. Accélération tangentielle numériquement égal au changement de vitesse par unité de temps et dirigé le long de la tangente au cercle. Si >0, >0, alors le mouvement est uniformément accéléré. Si<0 и <0 – движение.
10. Loi du mouvement uniformément accéléré dans un cercle. Le chemin parcouru autour d'un cercle dans le temps en mouvement uniformément accéléré est calculé par la formule :
En remplaçant , , et en réduisant par , nous obtenons la loi du mouvement uniformément accéléré dans un cercle :
Ou si.
Si le mouvement est uniformément lent, c'est-à-dire<0, то
11.Accélération totale dans un mouvement circulaire uniformément accéléré. Dans un mouvement circulaire uniformément accéléré, l’accélération centripète augmente avec le temps, car En raison de l'accélération tangentielle, la vitesse linéaire augmente. Très souvent, l'accélération centripète est dite normale et est notée. Puisque l'accélération totale à un instant donné est déterminée par le théorème de Pythagore (Fig. 27).
12. Vitesse angulaire moyenne en mouvement uniformément accéléré dans un cercle. La vitesse linéaire moyenne en mouvement uniformément accéléré dans un cercle est égale à . En substituant ici et en réduisant par nous obtenons
Si donc.
12. Formules établissant la relation entre la vitesse angulaire, l'accélération angulaire et l'angle de rotation dans un mouvement uniformément accéléré dans un cercle.
Remplacement des quantités , , , , dans la formule
et en réduisant de , on obtient
Conférence-4.
1. Dynamique
2. Interaction des corps.
3. Inertie. Le principe d'inertie.
4. Première loi de Newton.
5. Point matériel gratuit.
6. Système de référence inertiel.
7. Système de référence non inertiel.
8. Le principe de relativité de Galilée.
9. Transformations galiléennes.
11. Addition de forces.
13. Densité des substances.
14. Centre de masse.
15. Deuxième loi de Newton.
16. Unité de force.
17. Troisième loi de Newton
1. Dynamique il existe une branche de la mécanique qui étudie le mouvement mécanique, en fonction des forces qui provoquent une modification de ce mouvement.
2.Interactions des corps. Les corps peuvent interagir à la fois par contact direct et à distance grâce à un type particulier de matière appelé champ physique.
Par exemple, tous les corps sont attirés les uns vers les autres et cette attraction s'effectue à travers le champ gravitationnel, et les forces d'attraction sont appelées gravitationnelles.
Les corps porteurs d’une charge électrique interagissent via un champ électrique. Les courants électriques interagissent à travers un champ magnétique. Ces forces sont appelées électromagnétiques.
Les particules élémentaires interagissent via des champs nucléaires et ces forces sont appelées nucléaires.
3.Inertie. Au 4ème siècle. avant JC e. Le philosophe grec Aristote a soutenu que la cause du mouvement d'un corps est la force agissant sur un ou plusieurs autres corps. En même temps, selon le mouvement d’Aristote, une force constante confère au corps une vitesse constante et, avec la cessation de la force, le mouvement cesse.
Au 16ème siècle Le physicien italien Galileo Galilei, menant des expériences avec des corps roulant sur un plan incliné et avec des corps tombant, a montré qu'une force constante (dans ce cas, le poids d'un corps) confère une accélération au corps.
Ainsi, sur la base d'expériences, Galilée a montré que la force est la cause de l'accélération des corps. Présentons le raisonnement de Galilée. Laissez une balle très lisse rouler le long d’un plan horizontal lisse. Si rien n’interfère avec le ballon, celui-ci peut rouler aussi longtemps que vous le souhaitez. Si une fine couche de sable est versée sur le trajet de la balle, elle s'arrêtera très vite, car il était affecté par la force de friction du sable.
Ainsi Galilée est arrivé à la formulation du principe d'inertie, selon lequel un corps matériel maintient un état de repos ou un mouvement rectiligne uniforme si aucune force extérieure n'agit sur lui. Cette propriété de la matière est souvent appelée inertie, et le mouvement d'un corps sans influences extérieures est appelé mouvement par inertie.
4. La première loi de Newton. En 1687, sur la base du principe d'inertie de Galilée, Newton a formulé la première loi de la dynamique - la première loi de Newton :
Un point matériel (corps) est dans un état de repos ou de mouvement linéaire uniforme si d'autres corps n'agissent pas sur lui ou si les forces agissant sur d'autres corps sont équilibrées, c'est-à-dire compensé.
5.Point matériel gratuit- un point matériel qui n'est pas affecté par d'autres organismes. Parfois, ils disent - un point matériel isolé.
6. Système de référence inertiel (IRS)– un système de référence par rapport auquel un point matériel isolé se déplace de manière rectiligne et uniforme, ou est au repos.
Tout système de référence qui se déplace uniformément et rectiligne par rapport à l'ISO est inertiel,
Donnons une autre formulation de la première loi de Newton : Il existe des systèmes de référence par rapport auxquels un point matériel libre se déplace de manière rectiligne et uniforme, ou est au repos. De tels systèmes de référence sont appelés inertiels. La première loi de Newton est souvent appelée loi de l’inertie.
La première loi de Newton peut également être formulée ainsi : tout corps matériel résiste à un changement de sa vitesse. Cette propriété de la matière s’appelle l’inertie.
Nous rencontrons quotidiennement des manifestations de cette loi dans les transports urbains. Lorsque le bus prend brusquement de la vitesse, nous sommes plaqués contre le dossier du siège. Lorsque le bus ralentit, notre corps dérape en direction du bus.
7. Système de référence non inertiel – un système de référence qui se déplace de manière inégale par rapport à l'ISO.
Un corps qui, par rapport à l'ISO, est dans un état de repos ou de mouvement linéaire uniforme. Il se déplace de manière inégale par rapport à un référentiel non inertiel.
Tout système de référence rotatif est un système de référence non inertiel, car dans ce système, le corps subit une accélération centripète.
Il n’existe aucun organisme dans la nature ou dans la technologie qui pourrait servir d’ISO. Par exemple, la Terre tourne autour de son axe et tout corps à sa surface subit une accélération centripète. Cependant, pendant des périodes de temps assez courtes, le système de référence associé à la surface terrestre peut, dans une certaine mesure, être considéré comme ISO.
8.Le principe de relativité de Galilée. L'ISO peut être autant de sel que vous le souhaitez. Dès lors, la question se pose : à quoi ressemblent les mêmes phénomènes mécaniques dans différentes ISO ? Est-il possible, à l'aide de phénomènes mécaniques, de détecter le mouvement des ISO dans lesquels ils sont observés.
La réponse à ces questions est donnée par le principe de relativité de la mécanique classique, découvert par Galilée.
La signification du principe de relativité de la mécanique classique est l'énoncé : tous les phénomènes mécaniques se déroulent exactement de la même manière dans tous les référentiels inertiels.
Ce principe peut être formulé ainsi : toutes les lois de la mécanique classique sont exprimées par les mêmes formules mathématiques. En d’autres termes, aucune expérience mécanique ne nous aidera à détecter le mouvement de l’ISO. Cela signifie qu’essayer de détecter un mouvement ISO n’a aucun sens.
Nous avons rencontré la manifestation du principe de relativité lors d'un voyage en train. Au moment où notre train se trouve à la gare et que le train se trouvant sur la voie adjacente commence lentement à bouger, alors dans les premiers instants, il nous semble que notre train bouge. Mais cela se produit aussi dans l'autre sens, lorsque notre train prend doucement de la vitesse, il nous semble que le train voisin s'est mis en mouvement.
Dans l’exemple ci-dessus, le principe de relativité se manifeste sur de petits intervalles de temps. À mesure que la vitesse augmente, nous commençons à ressentir des chocs et des balancements de la voiture, c'est-à-dire que notre système de référence devient non inertiel.
Il est donc inutile d’essayer de détecter un mouvement ISO. Par conséquent, il est absolument indifférent de savoir quelle ISO est considérée comme stationnaire et laquelle est en mouvement.
9. Transformations galiléennes. Laissez deux ISO se déplacer l’une par rapport à l’autre avec une vitesse. Conformément au principe de relativité, nous pouvons supposer que l'ISO K est stationnaire et que l'ISO se déplace relativement à une vitesse. Pour plus de simplicité, nous supposons que les axes de coordonnées correspondants des systèmes et sont parallèles et que les axes et coïncident. Laissez les systèmes coïncider au moment du début et le mouvement se produit le long des axes et , c'est-à-dire (Fig.28)
11. Ajout de forces. Si deux forces sont appliquées à une particule, alors la force résultante est égale à leur force vectorielle, c'est-à-dire diagonales d'un parallélogramme construit sur des vecteurs et (Fig. 29).
La même règle s’applique lors de la décomposition d’une force donnée en deux composantes de force. Pour ce faire, on construit un parallélogramme sur le vecteur d'une force donnée, comme sur une diagonale dont les côtés coïncident avec la direction des composantes des forces appliquées à une particule donnée.
Si plusieurs forces sont appliquées à la particule, alors la force résultante est égale à la somme géométrique de toutes les forces :
12.Poids. L'expérience a montré que le rapport du module de force au module d'accélération que cette force confère au corps est une valeur constante pour un corps donné et est appelé la masse du corps :
De la dernière égalité il résulte que plus la masse du corps est grande, plus la force doit être appliquée pour changer sa vitesse. Par conséquent, plus la masse d’un corps est grande, plus il est inerte, c’est-à-dire la masse est une mesure de l'inertie des corps. La masse ainsi déterminée est appelée masse inertielle.
Dans le système SI, la masse est mesurée en kilogrammes (kg). Un kilogramme est la masse d'eau distillée dans un volume d'un décimètre cube prise à une température
13. Densité de matière– la masse d’une substance contenue dans une unité de volume ou le rapport entre la masse corporelle et son volume
La densité est mesurée en () dans le système SI. Connaissant la densité d'un corps et son volume, vous pouvez calculer sa masse à l'aide de la formule. Connaissant la densité et la masse d'un corps, son volume est calculé à l'aide de la formule.
14.Le centre de masse- un point d'un corps qui a la propriété que si la direction de la force passe par ce point, le corps se déplace en translation. Si la direction d’action ne passe pas par le centre de masse, alors le corps se déplace tout en tournant autour de son centre de masse.
15. Deuxième loi de Newton. En ISO, la somme des forces agissant sur un corps est égale au produit de la masse du corps et de l'accélération que lui confère cette force.
16.Unité de force. Dans le système SI, la force est mesurée en newtons. Un newton (n) est une force qui, agissant sur un corps pesant un kilogramme, lui confère une accélération. C'est pourquoi .
17. Troisième loi de Newton. Les forces avec lesquelles deux corps agissent l'un sur l'autre sont de même ampleur, de direction opposée et agissent le long d'une ligne droite reliant ces corps.